
Electromagnetic Field
Electromagnetism is a branch of physics involving the study of the electromagnetic force, a type of physical interaction that occurs between electrically charged particles. The electromagnetic force is carried by electromagnetic fields composed of electric fields and magnetic fields, and it is responsible for electromagnetic radiation such as light. It is one of the four fundamental interactions (commonly called forces) in nature, together with the strong interaction, the weak interaction, and gravitation.
References:
1. William Hayt, John Buck, “Engineering Electromagnetics” McGraw-Hill, 2001.
2. Sadiku, “Elements of Electromagnetic”.
3. Karl E., “Fundamental of Electromagnetics with MATLAB,” SciTech, 2005.
Table of Contents:
Lecture 1: electric field
1.1 Electrostatic Fields
1.2 Coulomb’s Law and Electric Field strength
Field Due to a Continuous Volume Charge Distribution
Field of a Line Charge
Field of a sheet of Charge
Lecture 2: electric flux density
2.1 Electric Flux Density
Flux Lines, Displacement Density
2.2 Gauss’s Law
2.3 Applications of Gauss’s Law
2.4 Application of Gauss’s Law: Differential Volume Element
2.5 Divergence and Maxwell’s First Equation
2.6 Vector Operator and the Divergence Theorem
Lecture 3: energy and potential
3.1 Energy Expanded in Moving a Point Charge in an Electric Field
3.2 Definition of Potential Difference and Potential
3.3 Potential Field of a Point Charge
3.4 Energy Density stored in the Electrostatic Field
Lecture 4: Conductors and dielectrics
Conductor, dielectric, dielectric polarization
4.1 Current and Current Density
4.2 Metallic Conductors
Valance band, Conduction band, Energy gap
4.3 Semiconductors
4.4 The Nature of Dielectric Materials
Polarization, Permittivity, Ferroelectric materials, Hysteresis effects
Lecture 5: capacitance
Capacitor, Inductor
5.1 Capacitance Defined
5.2 Parallel Plate Capacitor
5.3 Several Capacitance Examples
5.4 Poisson’s and Laplace’s Equations
Lecture 6: Steady Magnetic field
Magnetic field strength, Magnetic flux density
6.1 Applying curl to the Ampere’s Circuital Law
6.2 Stokes’ Theorem
6.3 Magnetic flux and Magnetic flux density
Permeability, Tesla, Gauss, Weber
Lecture 7: Magnetic Forces, Materials, and inductance
7.1 Force on a Moving Charge
7.2 The Nature of Magnetic Materials
Diamagnetic, Paramagnetic, Ferromagnetic, Antiferromagnetic, Ferrimagnetic, and Superparamagnetic.
Antiferromagnetic materials
7.3 Magnetization and Permeability
7.4 The Magnetic Circuit
Magnetomotive force
7.5 Inductance
Lecture 8: Electromagnet fields
8.1 Field Theory
8.2 Electromagnetics
8.3 Induced Electromotive Force
8.4 Energy Stored in an Electromagnetic Field
8.5 Electromagnetic Induction

Engineering Mechanics II
Dynamics is that branch of mechanics which deals with the motion of bodies under the action of forces. The study of dynamics in engineering usually follows the study of statics, which deals with effects of forces on bodies at rest. Dynamics has tow distinct part: kinematics, which is the study of motion without reference to the forces which cause motion, and kinetics, which relates the action of forces on bodies to their resulting motions. A thorough comprehension of dynamics will provide one of the most useful and powerful tools for analysis in engineering.
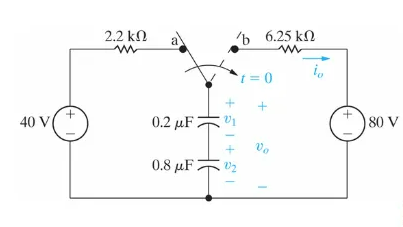
Electric Network
An electrical circuit (also known as an electrical network or electric circuit) is an interconnection of various active and passive components in a prescribed manner to form a closed path. Electric current must be able to flow from the source through some conductive medium and then back to the other terminal of the source.
Electronic II
References:
1. Robert L. Boylested and Louis Nashelsky, Electronic Devices and Circuit Theory.
2. Thomas L. Floyd, Electronic Devices.
3. Thedore F. Bogart, Electronic Devices and Circuits, Second Edition.
Table of Contents:
1. Introduction
2. Field-Effect transistor (FET)
3. Construction and Characteristics of JFET
4. Equivalent circuits Drain-source
5. JFET parameters
6. Small signal model
7. Amplifier Frequency Response Analysis
8. Operational Amplifier - part I
9. Operational Amplifier - part II
10. Common mode rejection ratio (CMRR)
11. Applications of Operational Amplifier – part I
12. Applications of Operational Amplifier – part II

Mathematics IV
Vectors analysis, vector components ,unit vector , space coordinates(Cartesian ,cylindrical and spherical), scalar and vector products, parametric equations of line and plane, application of vectors ,Del and Curl operators, partial differentiation, directional derivative, jacobians, multiple integrals, double integrals ,triple integrals, ordinary differential equations , 1st order equations ,separable variables equations ,homogenous, linear equation , exact equations, 2nd order equations ,linear equations with constant coefficients, nonhomogeneous linear equations with constant coefficients, Engineering applications.

Limbs Anatomy
Introduction to anatomy, terms of description and movement basic anatomical structure I basic anatomical stricture II, radiological
and across sectional anatomy, osteology of the upper limbs, joint of the shoulder girdle, scapular and shoulder muscle, axilla and
brachial plexus, arm and elbow joint, cubital fossa and forearm, wrist and hand, functional anatomy of the hand, fascia veins and
lymphatics of the upper limb, never injuries in the upper limb, the hip joint and osteology of the femur, the thigh , the gluteal
region, the knee joint and popliteal fossa. the leg and its compartments, venous system of lower limb, ankle joint and arches of the
foot, the foot ,never injuries in the lower limb.
